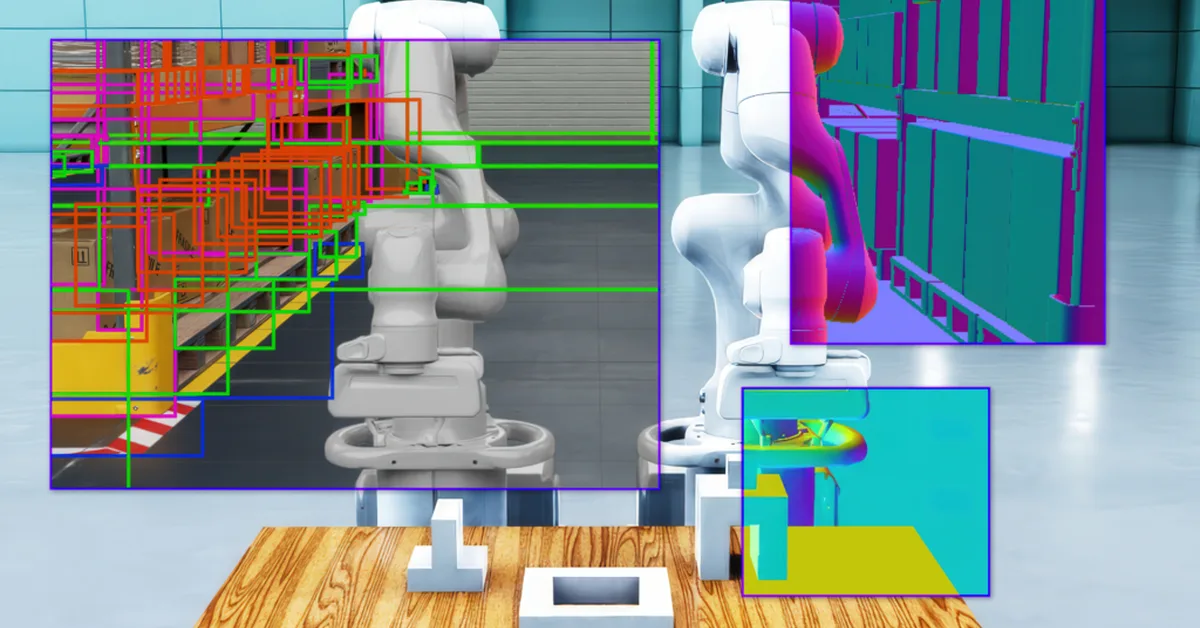
Researchers introduced Interactive World Simulator, a framework that uses consistency models to predict physical interactions in robotics at high speed and stability. This tool enables efficient training of robot policies using simulated data, which performs similarly to real-world data across various tasks, making it a valuable resource for scalable robotic policy development and evaluation.
Read the full article at arXiv cs.CV (Vision)
Want to create content about this topic? Use Nemati AI tools to generate articles, social posts, and more.
4
Comments

Ali NematiWritten by Ali