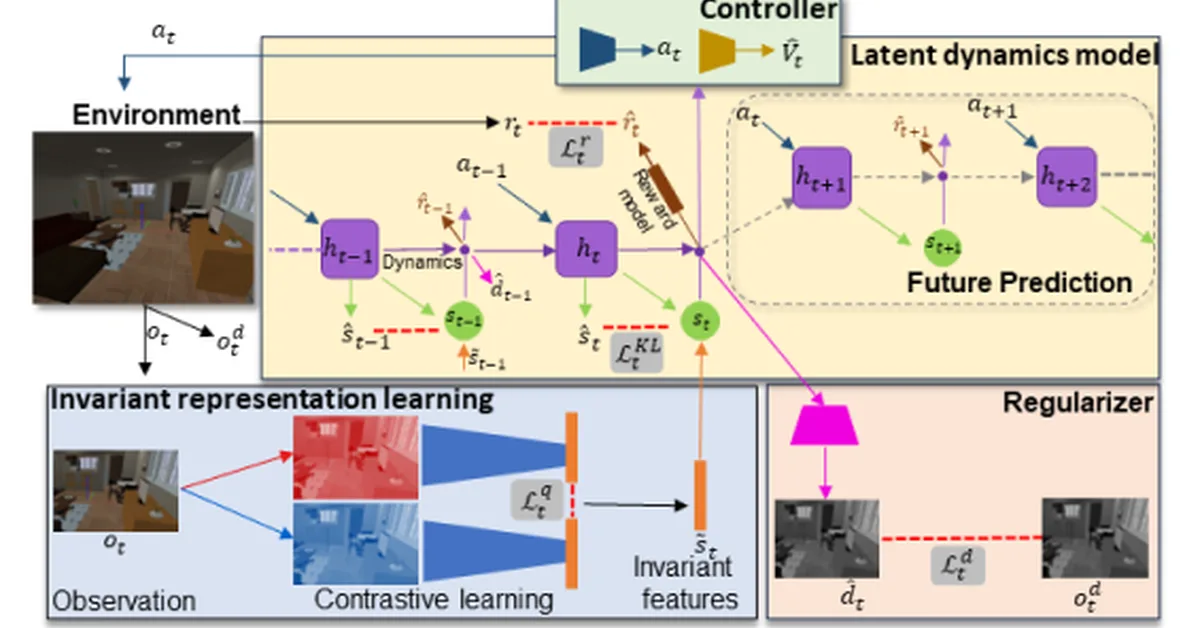
Researchers introduced Squint, a visual reinforcement learning method that accelerates training time compared to existing approaches by using parallel simulation and optimized implementation techniques. This advancement is crucial for content creators focusing on robotics as it significantly reduces the computational resources needed for sim-to-real transfer in complex manipulation tasks.
Read the full article at arXiv cs.LG (ML)
Want to create content about this topic? Use Nemati AI tools to generate articles, social posts, and more.
22
Comments
AN
Ali NematiWritten by Ali