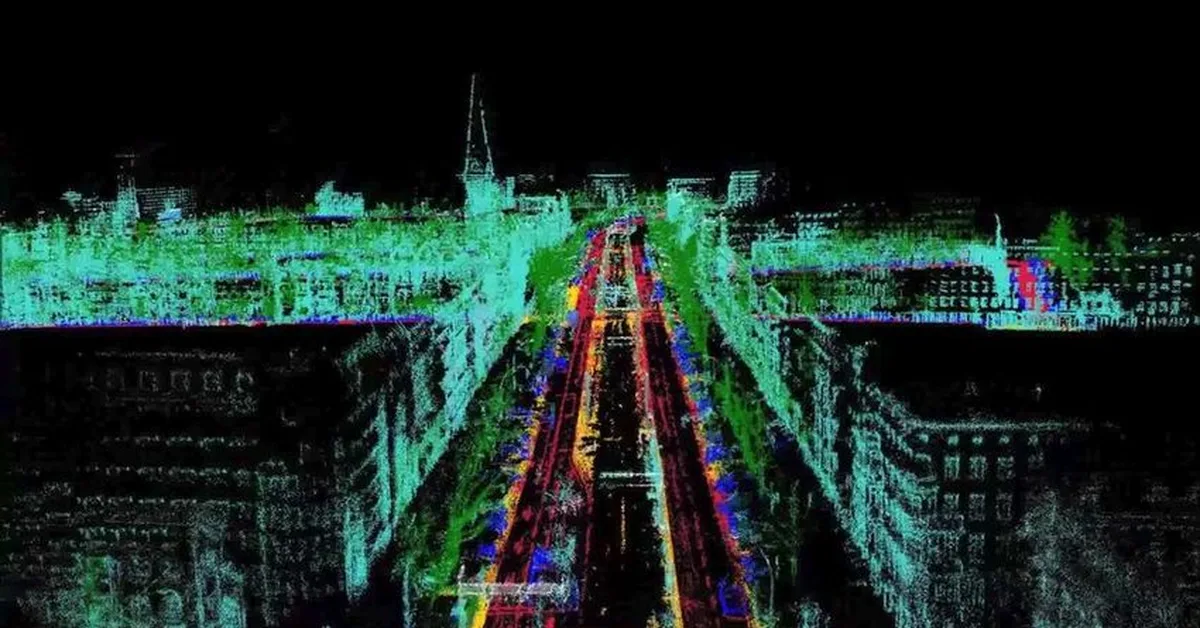
Researchers introduced a new method for generating realistic 3D semantic scene-scale data without relying on image projections or multi-resolution models, addressing the gap between real and simulated data in autonomous driving applications. This approach enhances the training of semantic segmentation networks by reducing annotation efforts and improving model performance when combined with real-world data.
Read the full article at arXiv cs.CV (Vision)
Want to create content about this topic? Use Nemati AI tools to generate articles, social posts, and more.
4
Comments
AN
Ali NematiWritten by Ali